After I started college, PR Lite was upgraded to a new robot called PR2 Lite. Read the latest updates at Matthew's blog! Also, PR Lite is featured in the December 2011 and August 2013 issues of Servo Magazine!
Software repositories: PC code and AVR code
Hardware specifications: microcontrollers and wheel base
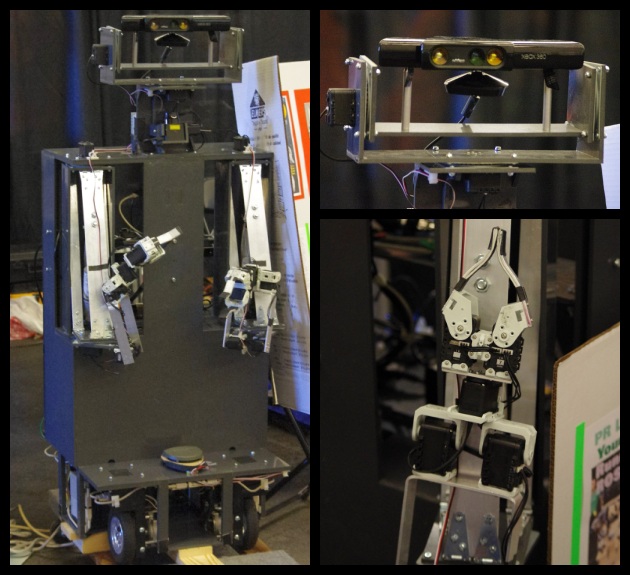
PR2 Lite at RoboGames 2012 (photos taken by Tim Craig)
PR Lite at RoboGames 2011 (view more photos)
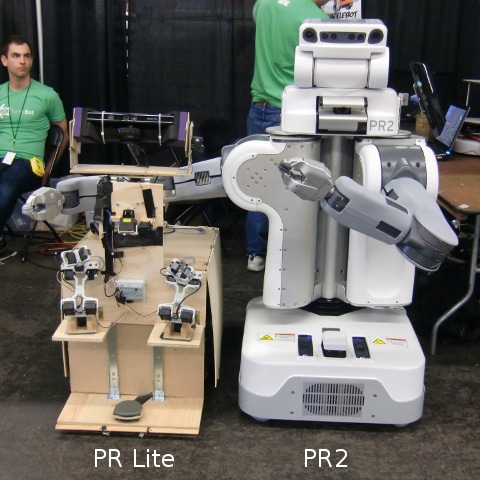
Comparison with PR2:
As shown in the table below, the capabilities of PR Lite are analogous to those of PR2, but are lower quality.
| PR Lite | PR2 | |
| head camera | Kinect (2 cameras with LED texture projector for 3D vision) | 3 cameras with LED texture projector for 3D vision |
| base lidar | Neato | Hokuyo UTM-30LX |
| tilting lidar | Hokuyo URG-04LX-UG01 | Hokuyo UTM-30LX |
| arm DOF | 5 (shoulder pan, tilt, elbow, wrist rotate, left finger, right finger) | 7 (includes forearm and upper arm roll) |
| arm payload | 2.5 lbs | 4 lbs |
| number of arms | 2 | 2 |
| drive system | forward with differential steering; spin in place; sideways with differential steering | holonomic |
| torso | 12" telescopic | 12.3" telescopic |
| computer | i7 quad-core with hyper-threading, 6 GB memory, 60 GB solid state drive | two i7 quad-core, 24 GB memory, 2 TB disk space (all 2x) |
| network | 8 USB ports, I²C | EtherCAT |
| batteries | five 12v Lead-Acid; 30 min runtime | Lion; 2 hour runtime |
| software | ROS | ROS |
| joystick control | yes | yes |
| wireless | yes | yes |
| IMU | Sparkfun 6 DOF* | Microstrain 3DM-GX2 |
| arm cameras | webcam* | Ethernet camera |
* part currently not installed on robot
RoboGames 2011 demo:
Our completed PR Lite prototype was demoed at RoboGames 2011, occupying the booth next to Willow Garage and PR2! Our demo featured PR Lite's arms mimicking a person's arms. A Kinect used the OpenNI library to find the subject's skeleton. This skeleton was transformed into spherical coordinates (with a radius), and inverse kinematics were used to position PR Lite's arms. The arms were made from the Bioloid comprehensive kit constructed to be similar to two Crustcrawler arms. ROS packages from the University of Arizona were then used to control the arms.
Future plans (as of 4/28/2011):
The initial PR Lite prototype was finished only barely in time for RoboGames. Many enhancements are planned to make PR Lite even more like PR2. We also want to harden the prototype against loose wires and bolts by fabricating some boards, and replacing many of the Bioloid construction kit parts with simple bent aluminum bars. Most of all, we want to take advantage of our advanced capabilities by doing our own hackathons!
Contributors:
Andrew Downing (me): navigation, high-level wheel controller
Matthew Downing: prototype construction, CAD modeling
Nathaniel Lewis: arms, Kinect
Robert Ou: low-level wheel controller, firmware
Alan Downing, Frank Ou, and Michael Lewis (fathers): mentors and miscellaneous
